 |
am2zzw00008223
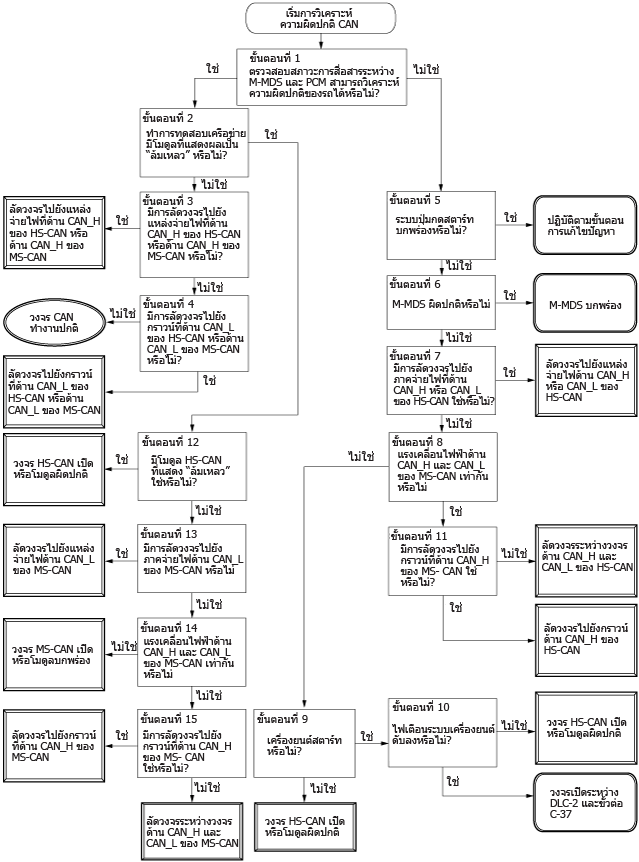
แผนผังการวิเคราะห์ความผิดปกติของเครือข่ายควบคุมพื้นที่ (CAN) [SKYACTIV-D 1.5]
id100218000100
แผนผังการวิเคราะห์ความผิดปกติของ CAN
แผนผังการทำงาน
am2zzw00008223
|
ขั้นตอนการวิเคราะห์
|
ขั้นตอน |
การตรวจสอบ |
การดำเนินการ |
|
|---|---|---|---|
|
1
|
ตรวจสอบว่า M-MDS และ PCM สามารถสื่อสารกันได้
• เชื่อมต่อ M-MDS เข้ากับ DLC-2
• ON สวิตช์กุญแจ (ดับเครื่องยนต์)
• ทำการวิเคราะห์ความผิดปกติของรถยนต์
• สามารถวิเคราะห์ความผิดปกติของรถได้ใช่หรือไม่?
|
ใช่
|
ไปยังขั้นตอนถัดไป
|
|
ไม่ใช่
|
ไปที่ขั้นตอนที่ 5 เนื่องจากเกิดความผิดปกติในวงจร HS-CAN
|
||
|
2
|
ตรวจสอบโมดูลเพื่อหาความบกพร่องในการสื่อสารเนื่องจากเกิดความผิดปกติกับ CAN
• ทำการทดสอบเครือข่ายโดยใช้ M-MDS
• มีโมดูลที่ผิดปกติ ใช่หรือไม่?
|
ใช่
|
ไปที่ขั้นตอนที่ 12 เนื่องจากเกิดความผิดปกติในวงจร CAN
|
|
ไม่ใช่
|
ไปยังขั้นตอนถัดไป
|
||
|
3
|
ตรวจสอบการลัดวงจรไปยังแหล่งจ่ายไฟในด้าน CAN_H ของ MS-CAN ของ HS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• มีค่าแรงเคลื่อนไฟฟ้า B+ ระหว่างขั้วใดๆ หรือไม่?
|
ใช่
|
มีการลัดวงจรไปยังแหล่งจ่ายไฟในด้าน CAN_H ของ MS-CAN หรือ HS-CAN
ระบุตำแหน่งการลัดวงจรไปยังแหล่งจ่ายไฟโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับการะบุตำแหน่งที่มีการลัดวงจรไปยังแหล่งจ่ายไฟ
|
|
ไม่ใช่
|
ไปยังขั้นตอนถัดไป
|
||
|
4
|
ตรวจสอบการลัดวงจรไปยังกราวน์ที่ด้าน CAN_L ของ HS-CAN หรือ MS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• แรงเคลื่อนไฟฟ้าที่วัดได้เท่ากับ 0 โวลต์ ใช่หรือไม่?
|
ใช่
|
มีการลัดวงจรไปยังกราวน์ในด้าน CAN_L ของ HS-CAN หรือ MS-CAN
ระบุตำแหน่งการลัดวงจรไปยังกราวน์โดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งการลัดวงจรไปยังกราวน์
|
|
ไม่ใช่
|
วงจร CAN ในขณะนั้นทำงานเป็นปกติ ให้กลับไปที่คำนำ และดำเนินการตามขั้นตอนถัดไปของการวิเคราะห์ความผิดปกติของ CAN ในขั้นตอนการแก้ไขปัญหา
|
||
|
5
|
ตรวจสอบว่าระบบปุ่มกดสตาร์ททำงานบกพร่องหรือไม่
• ON สวิตช์กุญแจ (ดับเครื่องยนต์)
• สามารถ ON สวิตช์กุญแจได้ ใช่หรือไม่?
|
ใช่
|
ไปยังขั้นตอนถัดไป
|
|
ไม่ใช่
|
มีความผิดปกติกับระบบปุ่มกดสตาร์ท
ทำการวิเคราะห์โดยอ้างอิงจากการแก้ไขปัญหาตามอาการ
|
||
|
6
|
ตรวจสอบความผิดปกติของ M-MDS
• เชื่อมต่อ M-MDS เข้ากับรถยนต์ที่ปกติและทำการวิเคราะห์ความผิดปกติของรถ
• สามารถวิเคราะห์ความผิดปกติของรถได้ใช่หรือไม่?
|
ใช่
|
ไปยังขั้นตอนถัดไป
|
|
ไม่ใช่
|
M-MDS ผิดปกติ
ซ่อมแซม M-MDS
|
||
|
7
|
ตรวจสอบการลัดวงจรไปยังแหล่งจ่ายไฟใน HS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• มีค่าแรงเคลื่อนไฟฟ้า B+ ระหว่างขั้วใดๆ หรือไม่?
|
ใช่
|
มีการลัดวงจรไปยังแหล่งจ่ายไฟในด้าน CAN_H หรือ CAN_L ของ HS-CAN
ระบุตำแหน่งการลัดวงจรไปยังแหล่งจ่ายไฟโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับการะบุตำแหน่งที่มีการลัดวงจรไปยังแหล่งจ่ายไฟ
|
|
ไม่ใช่
|
ไปยังขั้นตอนถัดไป
|
||
|
8
|
ตรวจสอบวงจรเปิดใน HS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• แรงเคลื่อนไฟฟ้าระหว่างขั้วต่างๆ (ด้าน CAN_H และด้าน CAN_L) เท่ากันหรือไม่?
|
ใช่
|
ไปที่ขั้นตอนที่ 11 เนื่องจากมีการลัดวงจรไปยังกราวน์หรือการลัดวงจรระหว่างวงจรใน HS-CAN
|
|
ไม่ใช่
|
ไปยังขั้นตอนถัดไป
|
||
|
9
|
ระบุตำแหน่งวงจรเปิดในวงจร HS-CAN ว่าอยู่ระหว่าง DLC และขั้วต่อ C-37 หรือจุดอื่น
• สตาร์ทเครื่องยนต์เพื่อตรวจสอบว่าระบบป้องกันการสตาร์ทของเครื่องยนต์ทำงานเป็นปกติ
• สามารถสตาร์ทเครื่องยนต์ได้หรือไม่
|
ใช่
|
ไปยังขั้นตอนถัดไป
|
|
ไม่ใช่
|
มีวงจรเปิดระหว่าง PCM และขั้วต่อ C-37 ใน HS-CAN
ระบุตำแหน่งวงจรเปิดโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งวงจรเปิด
|
||
|
10
|
ระบุตำแหน่งวงจรเปิดในวงจร HS-CAN ว่าอยู่ระหว่าง DLC และขั้วต่อ C-37 หรือจุดอื่น
• ON สวิตช์กุญแจ (ดับเครื่องยนต์)
• ตรวจดูว่าไฟตรวจเช็กเครื่องยนต์บนแผงหน้าปัดสว่างหรือไม่
• สตาร์ทเครื่องยนต์
• ตรวจดูว่าไฟตรวจเช็กเครื่องยนต์ดับลงหรือไม่
• ไฟตรวจเช็กเครื่องยนต์ดับลงหรือไม่
|
ใช่
|
มีวงจรเปิดระหว่าง DLC-2 และขั้วต่อ C-37
ซ่อมแซมหรือเปลี่ยนชุดสายไฟที่มีวงจรเปิด จากนั้นกลับไปที่ขั้นตอนที่ 1
|
|
ไม่ใช่
|
มีวงจรเปิดระหว่าง PCM และขั้วต่อ C-37 ใน HS-CAN
ระบุตำแหน่งวงจรเปิดโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งวงจรเปิด
|
||
|
11
|
ตรวจสอบความผิดปกติในวงจร HS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• แรงเคลื่อนไฟฟ้าระหว่างขั้วทั้งสองขั้ว (ด้าน CAN_H และด้าน CAN_L) เท่าักับ 0 โวลต์ ใช่หรือไม่?
|
ใช่
|
มีการลัดวงจรไปยังกราวน์ด้าน CAN_H ของ HS-CAN
ระบุตำแหน่งการลัดวงจรไปยังกราวน์โดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งการลัดวงจรไปยังกราวน์
|
|
ไม่ใช่
|
มีการลัดวงจรระหว่างวงจรด้าน CAN_H และด้าน CAN_L ของ HS-CAN
ตรวจสอบตำแหน่งการลัดวงจรระหว่างวงจรโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับการตรวจสอบตำแหน่งการลัดวงจรระหว่างวงจร
|
||
|
12
|
ระบุข้อกำหนดในการสื่อสาร CAN ที่เกิดความผิดปกติ
• ให้อ้างอิงจากตารางอ้างอิงข้อจำกัดของการสื่อสาร CAN อย่างรวดเร็ว และตรวจสอบว่าข้อจำกัดของการสื่อสาร CAN (HS-CAN หรือ MS-CAN) เชื่อมต่ออยู่กับโมดูลที่มีความผิดปกติ
• ใช่โมดูลที่มีความผิดปกติใน HS-CAN หรือไม่?
|
ใช่
|
มีวงจรเปิดใน HS-CAN
ระบุตำแหน่งวงจรเปิดโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งวงจรเปิด
|
|
ไม่ใช่
|
ไปยังขั้นตอนถัดไป
|
||
|
13
|
ตรวจสอบการลัดวงจรไปยังแหล่งจ่ายไฟในด้าน CAN_L ของ MS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้ว K ของ DLC-2 (ด้าน CAN_L) และกราวน์ตัวถัง
• สามารถวัดแรงเคลื่อนไฟฟ้า B+ ได้ใช่หรือไม่?
|
ใช่
|
มีการลัดวงจรไปยังแหล่งจ่ายไฟที่ด้าน CAN_L ของ MS-CAN
ระบุตำแหน่งการลัดวงจรไปยังแหล่งจ่ายไฟโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับการะบุตำแหน่งที่มีการลัดวงจรไปยังแหล่งจ่ายไฟ
|
|
ไม่ใช่
|
ไปยังขั้นตอนถัดไป
|
||
|
14
|
ตรวจสอบวงจรเปิดใน MS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• แรงเคลื่อนไฟฟ้าระหว่างขั้วต่างๆ (ด้าน CAN_H และด้าน CAN_L) เท่ากันหรือไม่?
|
ใช่
|
ไปยังขั้นตอนถัดไป
|
|
ไม่ใช่
|
มีวงจรเปิดใน MS-CAN
ระบุตำแหน่งวงจรเปิดโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งวงจรเปิด
|
||
|
15
|
ตรวจสอบความผิดปกติในวงจร MS-CAN
• วัดแรงเคลื่อนไฟฟ้าระหว่างขั้วต่อไปนี้:
• แรงเคลื่อนไฟฟ้าระหว่างขั้วทั้งสองขั้ว (ด้าน CAN_H และด้าน CAN_L) เท่าักับ 0 โวลต์ ใช่หรือไม่?
|
ใช่
|
มีการลัดวงจรไปยังกราวน์ที่ด้าน CAN_H ของ MS-CAN
ระบุตำแหน่งการลัดวงจรไปยังกราวน์โดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับระบุตำแหน่งการลัดวงจรไปยังกราวน์
|
|
ไม่ใช่
|
มีการลัดวงจรระหว่างวงจรที่ด้าน CAN_H และด้าน CAN_L ของ MS-CAN
ตรวจสอบตำแหน่งการลัดวงจรระหว่างวงจรโดยอ้างอิงจากขั้นตอนการวิเคราะห์สำหรับการตรวจสอบตำแหน่งการลัดวงจรระหว่างวงจร
|
||
ตารางอ้างอิงข้อจำกัดของการสื่อสาร CAN อย่างรวดเร็ว
|
โมดูลที่เกี่ยวข้องกับการสื่อสาร CAN (การแสดงผลของ M-MDS) |
ข้อจำกัดของการสื่อสาร CAN |
|
|---|---|---|
|
HS-CAN |
MS-CAN |
|
|
PCM
(PCM)
|
×
|
|
|
DSC HU/CM
(ABS)
|
×
|
|
|
TCM
(TCM)
|
×
|
|
|
โมดูลควบคุมการปรับระดับไฟหน้าอัตโนมัติ
(ALM)
|
×
|
|
|
DC-DC converter (i-ELOOP)
(DCDC)
|
×
|
|
|
BCM
(BCM)
|
×
|
|
|
เลเซอร์เซ็นเซอร์
(SCBS)
|
×
|
|
|
กล้องตรวจจับด้านหน้า (FSC)
(FSC)
|
×
|
|
|
โมดูลควบคุม SAS
(RCM)
|
×
|
|
|
ชุดเชื่อมต่อหลัก (CMU)
(CMU)
|
×
|
|
|
โมดูลควบคุม EPS
(EPS)
|
×
|
|
|
ชุด SSU
(SSU)
|
×
|
|
|
แผงหน้าปัด
(IC)
|
×
|
|
|
โมดูลควบคุมการตรวจสอบพื้นที่จุดบอด (BSM) (ซ้าย)
(BSM)
|
|
×
|
|
ชุดควบคุมอุณหภูมิ
(EATC)
|
|
×
|
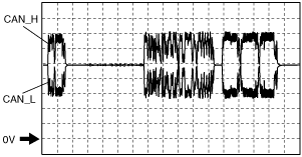
รูปแบบคลื่นสัญญาณ HS-CAN
|
สภาวะของวงจร CAN |
รูปแบบคลื่นสัญญาณ (อ้างอิง) |
|---|---|
|
ปกติ
|
 |
|
• CAN_H
• CAN_L
|
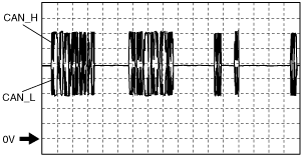
รูปแบบคลื่นสัญญาณ MS-CAN
|
สภาวะของวงจร CAN |
รูปแบบคลื่นสัญญาณ (อ้างอิง) |
|---|---|
|
ปกติ
|
 |
|
• CAN_H
• CAN_L
|